操作台前,来自中国科学院工业人工智能研究所IAII-IPRC团队的机械臂轻轻夹住一根试管,以精细的力度捏稳管壁,夹爪不断调整倾斜角度,随后垂直将其插入指定孔位,发出一声细微的“咔嗒”。裁判员在一旁仔细观察每一个动作,并同步记录下相应数据。
6月11日—13日,2026 WBCD全球双臂机器人技能挑战赛决赛在紫竹科学园区内举办。本届赛事采用上海、维也纳、硅谷三地联动的办赛模式,设置了物流拣选、物流装箱、晶泰科技生命科学、柔性物体操作四大赛道。上海赛区现场,来自高校、科研机构及创新企业的20余支队伍进入决赛,开启了激烈的同台竞技。
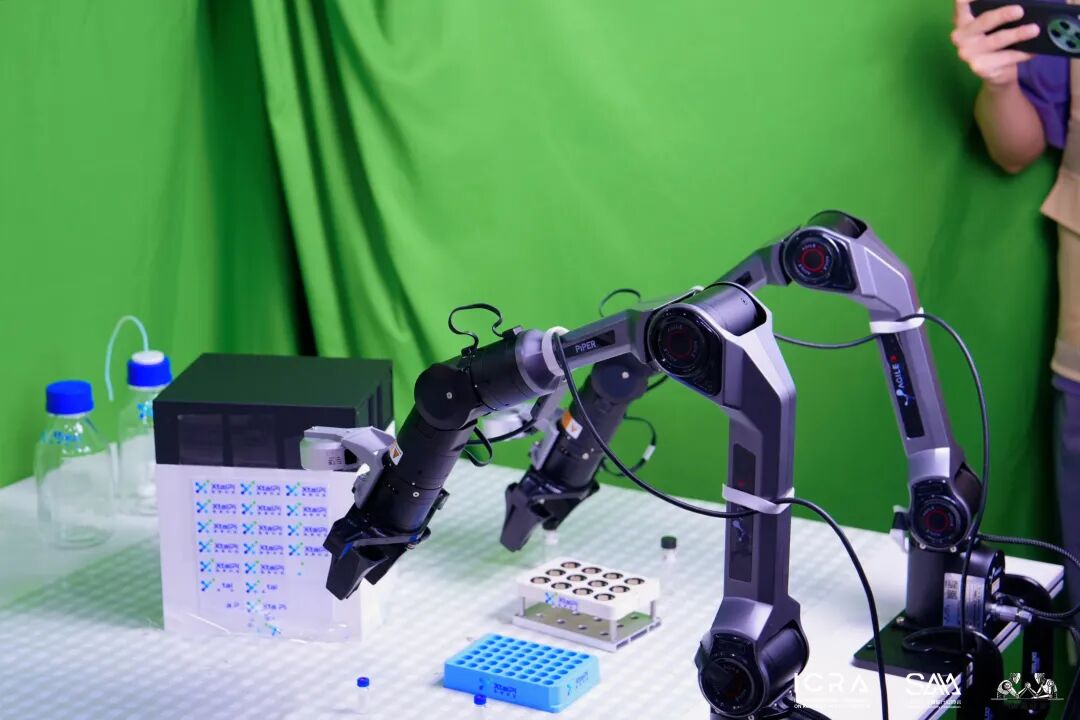
中国科学院工业人工智能研究所IAII-IPRC团队聚焦晶泰科技生命科学这一赛道。带队老师张子豪表示:“团队一直在研究智能和机器人相关的算法,过程中发现需要给自己的研究找一个能够落地的场景。生物实验是一个大家比较感兴趣的方向,这一赛道也非常契合研究方向。”
在有限的比赛时间内,这支队伍成了插拔试管与拧瓶盖、交换瓶盖的任务。团队认为生物医药企业当前有着大量的实验需求,未来有可能实现场景落地。此外,化工企业也是他们关注的方向。例如工厂不停运转产生废水,需要高频次进行水质检测,这样的重复性步骤完全可使用机械臂代替。

深圳晨昏线科技有限公司代表队选择了柔性物体操作这一赛道。操作台上,五件T恤层层平铺在操作台上,两只机械手臂夹起衣物的下摆,将其套在后方的板子上,随后完成折叠动作。
这家初创公司在前不久发布了阶段性的世界模型技术成果——目标因果世界模型TermiBrain GCWM1。这一模型是支撑公司整个技术体系的核心组件,它就像一个“大脑”往往决定着机器人能否完成一个场景里的任务。
公司算法总监沈光睿表示,叠衣服是一个比较难的任务,周围的光照、人群都是不可控的因素,可能造成干扰。这一模型使得机器人可理解物理世界的规则和空间关系,叠衣服是这个模型可实现具体的场景之一。
对于北京中关村学院的学生来说,参加这次比赛除了希望能拿名次,还希望能和别的参赛团队做一些技术交流。正在读博二的吴昊向记者表示,导师帮助前期协调设备等资源,但并没有带队前来,比赛由不同专业的几位学生相互配合完成,对大家来说是一次较大的挑战。这一团队闯入了晶泰科技生命科学与柔性物体操作两大赛道的决赛中。

此外,现场还能看到各种实际场景:机器人拿取物品,经识别之后放置在不同的框内,完成分拣的动作。操作台上的机械手臂可将箱子上附带的塑料袋拿开,将下面的饮料、玩偶一件件拿出来并装箱。
可以说,四大赛道的设置全面检验机器人“干活能力”,这也正是WBCD与传统机器人竞赛的最大区别。它更加关注机器人在真实场景中的自主操作能力,通过真实场景出题、真实任务验证和统一标准评测,全面考察机器人在感知、决策、规划与执行方面的综合能力,推动机器人能力评测从实验室走向产业现场。

比赛有胜负,但技术探索没有终点。中国科学院工业人工智能研究所关注生物医药与化工场景的落地,深圳晨昏线科技有限公司挑战柔性物体操作,北京中关村学院的学生们在协作中快速成长。这些赛场上的身影,正是中国智能制造从实验室走向产业一线的最好注脚。
当前,全球双臂机器人技能挑战赛正逐步成长为连接技术创新、产业需求与人才培养的重要桥梁。闵行区将以此次比赛为契机,持续对接各地创新资源,推动机器人关键技术突破、应用场景拓展和产业生态协同发展,为上海机器人产业高质量发展贡献闵行方案,共同助力人工智能赋能实体经济迈上新台阶。

记者:刘成荣
部分素材:区经委 上海市人工智能行业协会
审核:王婷婷 方雨斌


